
- Index
- >Projects
- >Past projects
- >ROBIBIO
ROBIBIO Research Project
Bio-inspired humanoid Robot
Group : Dynamic Systems and Optimization
Labelling: none
Duration: 05/02/2019 - 12/31/2022
Funding: RFI Atlanstic 2020
Staff involved from LARIS: Philippe Lucidarme, Nicolas Delanoue, Franck Mercier, Morgan Langard (PhD student)
Project partners: Yannick Aoustin (LS2N, REV group, Nantes)
Abstract and objectives

Over the last decades, several research teams have developed humanoid robots. This field has made great progress and the DARPA Challenge is an illustration of this. However, the community agrees that humanoid robotics is still in the beginning stages and that many scientific barriers remain to be overcome: autonomy, weight reduction, adaptation to exceptional situations... Dynamic walking and running are functionalities that still have scientific and technical obstacles that this project is dedicated to.
Historically, humanoid robots have inherited the architectures of industrial robots. The combination of a rotary motor (BLDC) and a gearbox (Harmonic Drives®) has become popular thanks to its torque/speed compromise. Unfortunately, the generally high reduction ratios are an obstacle to the reversibility of these actuators. An example of this limitation is the inability of humanoid robots to properly dampen the impact between the feet and the ground while running, jumping or even walking. In the human body, muscles play the dual role of actuators and dampeners. Our work is based on the idea that this analysis is transposable to humanoid robots. Reversibility then becomes an essential issue. Teams have already been interested in this issue, but the technologies studied have never allowed to obtain a fully satisfactory result. Hydraulic systems (BigDog and Atlas) are noisy, energy consuming, expensive and complex to regulate. Pneumatic systems (Pneupard) have low torque and require the integration of a compressor. Cable transmissions (Sherpa and Romeo) struggle to compete with traditional architectures.
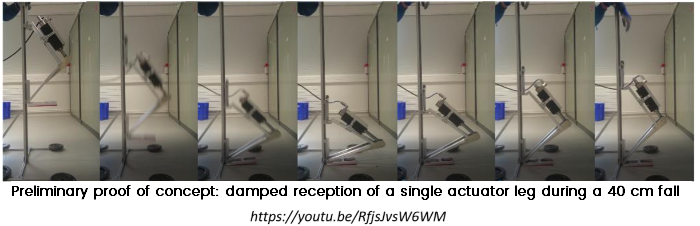
This project is based on two working hypotheses: use of linear motors and biarticular architecture. The results of the preliminary studies we have conducted suggest that they are inseparable. Direct-drive linear motors offer particularly interesting force/speed combinations. But their main interest lies in their reversibility which, with an adapted control, allows to obtain damping capacities (experimentation carried out at LARIS, illustrated above). Preliminary simulations suggest that it is possible to amplify these performances by exploiting bi-articular architectures, as animals and humans do. This was confirmed in 2016 by the Virginia Tech (USA) team, which considers this lead to be promising. An example of the proposed biarticular architecture is shown above.
The objective of this project is to build a bipedal walking robot using direct-drive linear actuators. Our roadmap for the 3 years of the project is the optimization, design, fabrication and control of a pair of planar robotic legs.
