
- index
- >Projets
- >Projets antérieurs
- >COCHISE
Projet de Recherche COCHISE
Coopération chien de service et robot pour l’homme
Équipe : Systèmes Dynamiques et Optimisation
Labellisation : non
Durée : 2013 - 2016
Financement : ANR
Personnels impliqués du LARIS : Philippe Lucidarme, Marie-Françoise Gérard
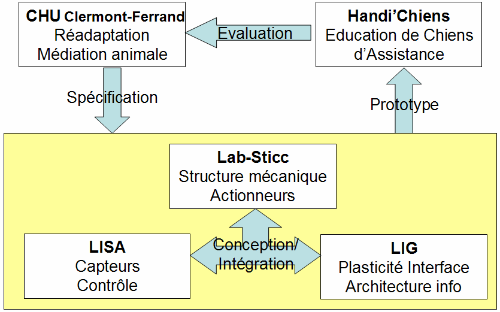
Partenaires du projet : Le service de Médecine Physique et Réadaptation du CHU de Clermont-Ferrand, le Centre d’Education d’Handi’Chiens (partenaire non financé), le Lab-STICC Laboratoire en sciences et techniques de l'information, de la communication et de la connaissance UMR 6285, le LIG Laboratoire d’informatique de Grenoble UMR 5217
Malgré les progrès récents en matière de robotique autour des machines autonomes, les machines capables d’une aide réelle de l’homme dans le cadre de la vie quotidienne reste limitées. D’un autre côté, l’animal, et en particulier le chien, a montré depuis de nombreuses années des capacités à compléter l’homme dans sa vie, soit dans des tâches quotidiennes, comme pour les chiens d’aides, soit dans des cas d’exceptions, comme les chiens d’avalanches ou d’intervention sur des tremblements de terre, soit dans la vie professionnelle pour la recherche de drogue par exemple. Malgré tout, chacun des systèmes, robot ou chien, possède ses propres limites par exemple : une marche ou un trou peut être fatal à un robot, un chat peut rendre « fou » un chien. L’idée qui voit le jour est donc de tirer parti du meilleur des deux entités pour rendre le couple animal/robot plus performant. Dans ce cadre, le sujet de recherche est vaste en particulier sur le développement d’interactions, de communications ou de coopérations entre un robot et un chien.
Le projet Cochise propose plus modestement de focaliser cette recherche sur une catégorie particulière de chiens : les chiens d’assistance aux personnes atteintes d’un handicap moteur qui ont pour rôle d’aider dans les gestes de la vie quotidienne et pour lesquels la problématique est bien identifiée. Dans ce cadre, le robot que nous proposons est spécifiquement destiné à « augmenter » le chien d’assistance afin de construire un « couple » performant par rapport à cette problématique posée. La machine deviendra un robot médiateur qui permet d’une part de « comprendre » l’état du chien et de le retransmettre à l’homme, d’autre part de lui permettre via le robot autonome de déclencher des enchaînements de comportements sur le chien. La question sous jacente du projet Cochise est : jusqu’à quel point un chien acceptera‐t‐il d’obéir à un robot ? et, quel type de robot faut-il concevoir pour cela ?
L’objectif du projet Cochise est double : d’une part augmenter la connaissance sur les interactions animal/système robotisé et d’autre part de réaliser un développement expérimental qui pourrait devenir rapidement un produit grand public.
Pour ce projet nous réunissons les compétences d’utilisateurs et de dresseurs de chiens d’assistance, de roboticiens spécialisés en capteurs et en actionneurs pour le réalisation du robot médiateur et enfin de spécialises en interface homme‐machine et architectures informatiques pour la partie opérationnelle avec l’utilisateur.
Partenaires du projet :
Contact : Philippe Lucidarme - philippe.lucidarme @ univ-angers.fr
Lien Web : http://projetcochise.imag.fr/
