- index
- >Projets
- >Projets antérieurs
- >RObot humanoïde BI-articulaires BIO-inspiré
Projet de Recherche ROBIBIO
RObot humanoïde BI-articulaires BIO-inspiré
Équipe : Systèmes Dynamiques et Optimisation
Labellisation : aucune
Durée : 02/05/2019 - 31/12/2022
Financement : RFI Atlanstic 2020
Personnels impliqués du LARIS : Philippe Lucidarme, Nicolas Delanoue, Franck Mercier, Morgan Langard (doctorant)
Partenaires du projet : Yannick Aoustin (LS2N, équipe REV, Nantes)
Résumé et objectifs
Au cours des dernières décennies, plusieurs équipes de recherche ont développé des robots humanoïdes. Ce domaine a fortement progressé et le DARPA Challenge en est l’illustration. Toutefois, la communauté s’accorde à dire que la robotique humanoïde en est encore à ses balbutiements et que de nombreux verrous scientifiques restent à lever : l‘autonomie, la réduction du poids, l’adaptation à des situations exceptionnelles… La marche dynamique et la course sont des fonctionnalités qui comportent encore des freins scientifiques et techniques auxquelles se consacre ce projet.
Historiquement, les robots humanoïdes ont hérité des architectures des robots industriels. La combinaison moteur rotatif (BLDC) et réducteur (Harmonic Drives®) s’est imposée grâce à son compromis couple / vitesse. Malheureusement, les rapports de réduction généralement élevés sont un frein à la réversibilité1 de ces actionneurs. Un exemple de limitation est l’incapacité des robots humanoïdes à amortir correctement les impacts entre les pieds et le sol pendant la course, le saut ou même la marche. Dans le corps humain, ce sont les muscles qui jouent ce double rôle d’actionneurs et d’amortisseurs. Nos travaux s’appuient sur l’idée que cette analyse est transposable aux robots humanoïdes. La réversibilité devient alors un enjeu essentiel. Des équipes s’y sont déjà intéressées, mais les technologies étudiées n’ont jamais permis d’obtenir un résultat pleinement satisfaisant. Les systèmes hydrauliques (BigDog et Atlas) sont bruyants, énergivores, couteux et complexes à réguler. Les systèmes pneumatiques (Pneupard) présentent des couples faibles et nécessitent l’intégration d’un compresseur. Les transmissions par câbles (Sherpa et Romeo) peinent à rivaliser avec les architectures traditionnelles.
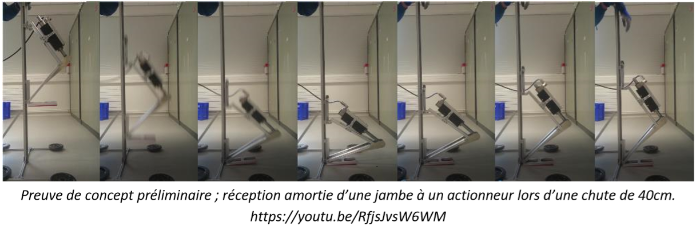
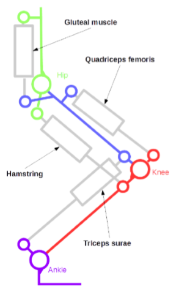
Ce projet s’appuie sur deux hypothèses de travail : utilisation de moteurs linéaires et architecture biarticulaire. Les résultats des études préliminaires que nous avons menées laissent supposer qu’elles sont indissociables. Les moteurs linéaires à entrainement direct présentent des combinaisons force / vitesse particulièrement intéressantes. Mais leur intérêt premier réside dans leur réversibilité qui, avec une commande adaptée, permet d’obtenir des capacités d’amortie (expérimentation réalisée au LARIS, illustrée ci-dessus). Les simulations préliminaires laissent penser qu’il est possible d’amplifier ces performances en exploitant des architectures bi-articulaires, comme le font les animaux et les humains. Cela a d’ailleurs été confortée en 2016 par l’équipe de Virginia Tech (USA) qui considère cette piste comme prometteuse. Un exemple d’architecture biarticulaire pressentie est illustrée ci-contre.
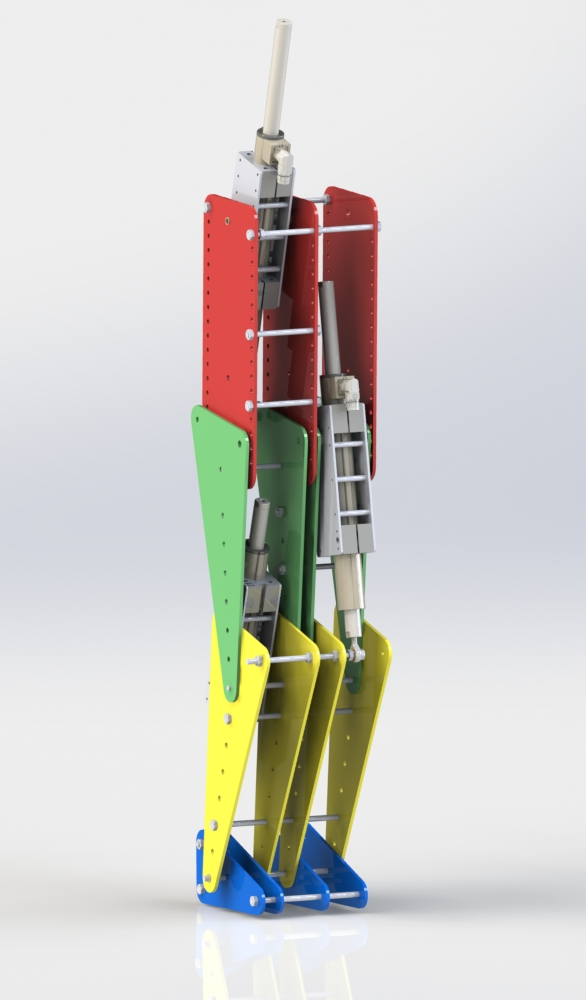
L’objectif de ce projet est de construire un robot marcheur bipède exploitant des actionneurs linéaires à entrainement direct. Notre feuille de route pour les 3 années du projet est l’optimisation, la conception, la fabrication et la commande d’une paire de jambes robotisée.
Simulateur
Télécharger le code [zip]
première conception CAO: